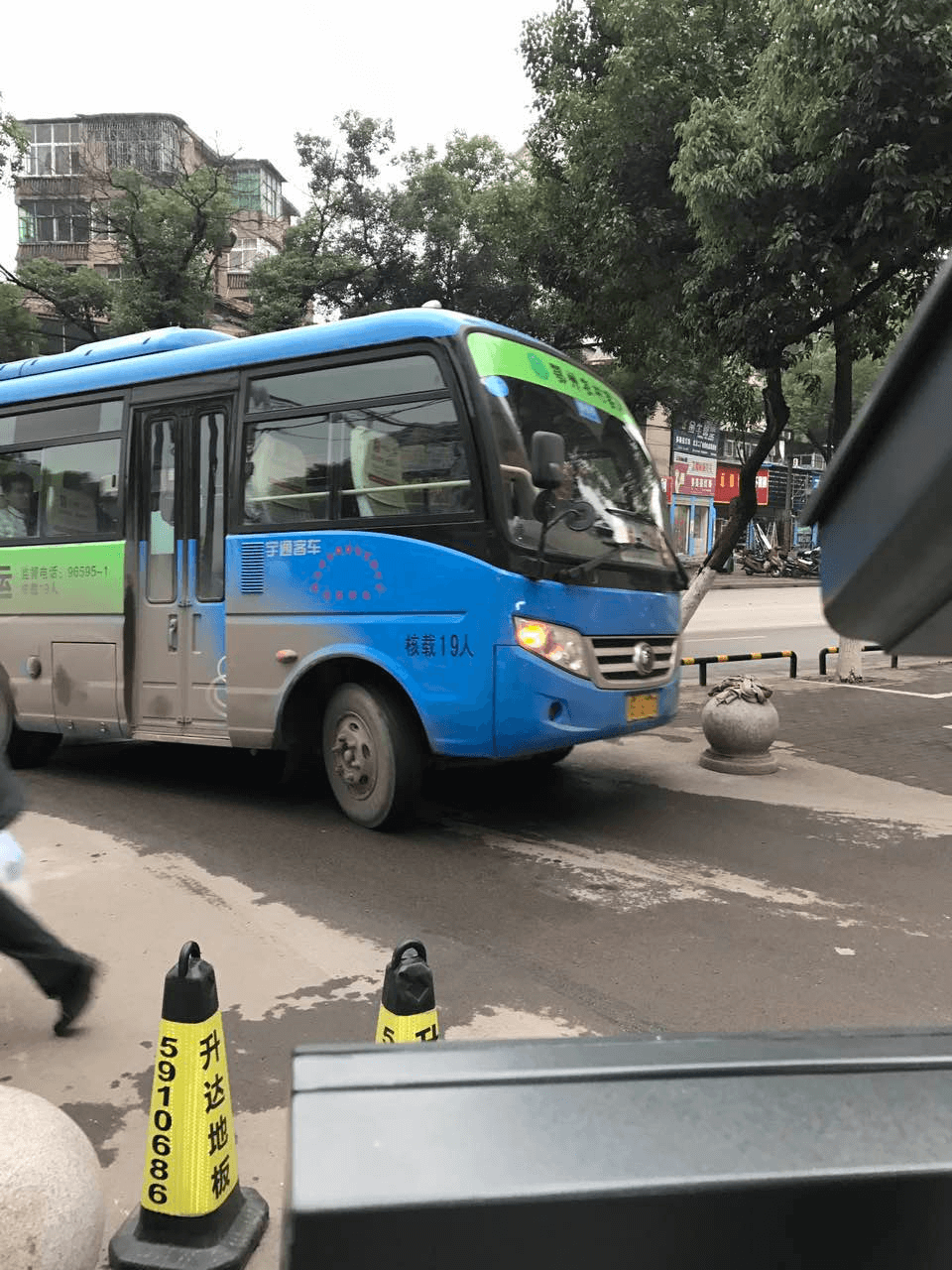
去现场观察,主要是要注意车道的长宽和来车方向. 车道的宽度尽量控制在4米内,大于4米的要摆放隔离桩限制;长度至少要有6米,太短会造成车牌识别不正,就像下图这样,车迁 直时摄像机已经看不到车牌了.
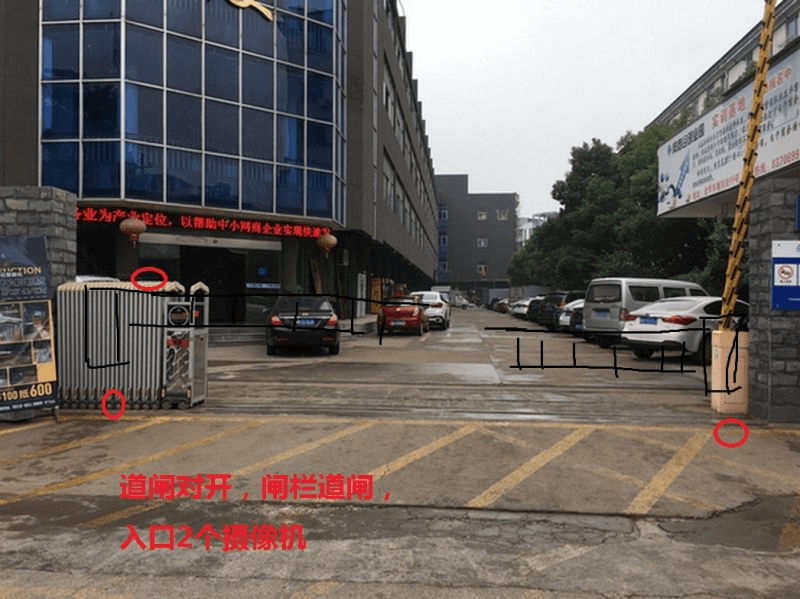
创盈购彩来车方向分单向来车和左右来车.单向来车就只用装一个摄像头,镜头对着车行来的方向; 双向来车的,就比较复杂,如果车道长度不够的,就需要左右各装一个相机来识别两个方向的车辆,如下图就需要安装两个相机

创盈购彩摄像头定位原则: a.摄像机安装在道闸主机前靠近车道的一侧,道匣杆起落时不能遮挡相机视线; b.相机 好的识别距离是离相机3-6米处,所以要保证车在此距离处车身已迁直,如果未迁直,就要将相机往后挪; c.要保证定位处车辆和行人不会误碰到摄像机; d.尽量紧靠道闸主机但又不能影响道闸使用; e.摄
像头定位处和车辆成像角度的侧角和俯角尽量控制在30度以内, 大不能高于45度,否则会影响识别率,若不能满足, 就要找其它的定位点.
创盈购彩f.定位处必须保证车辆不管从何处方向驶来,都能保证车牌可以被拍摄到,若不能满足就必须装加装摄像机辅助.
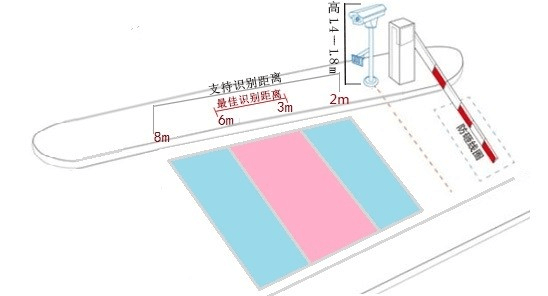
定位示意图
线路检查无误后,就开始通电调试了. 以调试一进一出停车场为例. a.将一个摄像机网线接入交换机,另一个像机暂不接入,因为像机出厂默认IP是192.168.1.100,如果同时接入会造成IP冲突. 这里先将进口相机接入交换机. b.用"一体机配置工具"搜索相机IP,如果搜索的到,说明网络通讯正常.
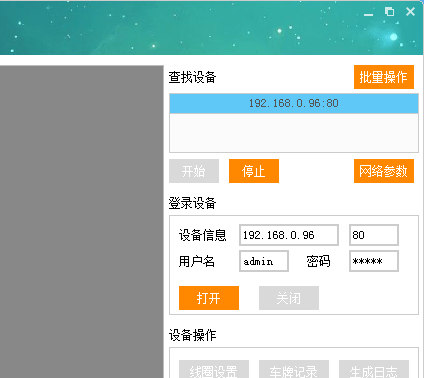
创盈购彩上图表示能搜索到已接入网络的相机. c.修改该相机IP地址,然后接入下一台摄像机,依此修改所有相机的IP.
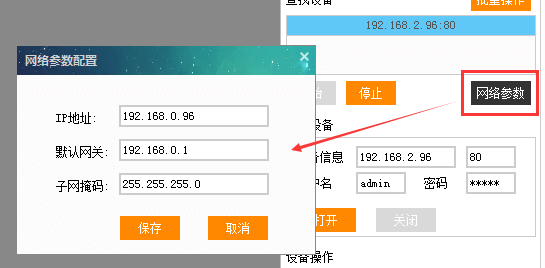
修改相机IP地址
创盈购彩d.调好相机角度,登入相机网页设置识别区域和虚拟线圈位置 就像前面说的,摄像头定位处和车辆成像角度的侧角和俯角尽量控制在30度以内, 大不能高于45度,满足这个条件的前提下 我们设置识别区域才有意义.
在网页端的"安装引导"上进行绘制,确保虚拟线圈绘制在视频画面的下半部分,务必确保所有来车的车牌都能触碰到虚拟线圈 以此来确定虚拟线圈的宽度; 虚拟线圈下边缘的线可以拉到视频画面的底部,以此来确定虚拟线圈的高度.如图:

车牌成像的像素值推荐在140~160之间,能够达到 佳识别率,或者车牌在视频画面的宽度占视频画面宽度的1/8~1/9 佳, 直观的调试方式:车牌在虚拟线圈区域的大小和蓝色虚拟车牌尺寸相当. 调试方法:
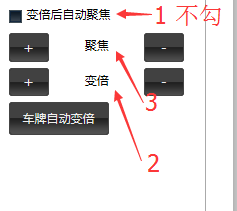
创盈购彩先变倍使车牌在画面中的显示尽量大点,然后聚焦,使画面变清晰.

创盈购彩同时调节摄像机万向节,使车牌尽量保持水平,避免出现车牌左高右低或者左低右高的情况, 佳的效果可以参考下图:


创盈购彩上图中,车牌在画面中基本是水平的,且大小合适. 小技巧:调节万向节,让相机往车辆驾驶室这边偏,直到车牌在图片中显示是水平的.

识别区域要把车牌在画面上的有效运动范围都包含进来. 注意:所有现场都必须画上识别区域! 如图:
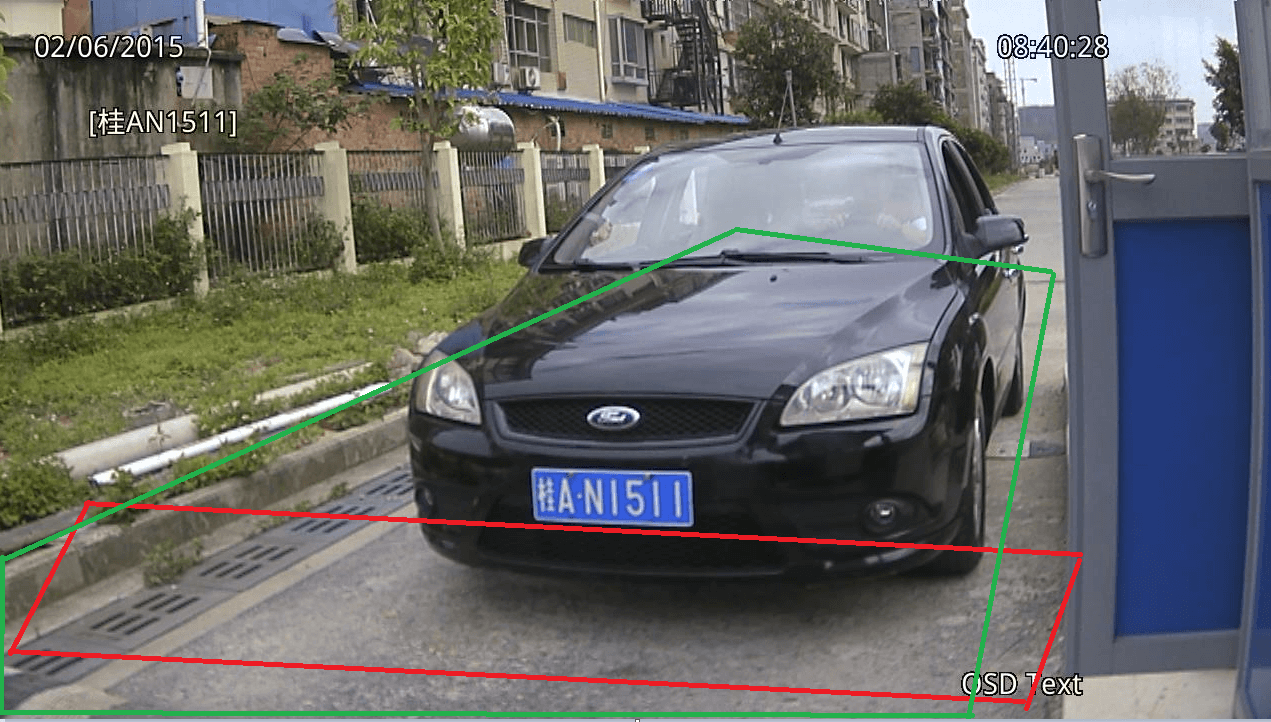
设置完成后,在实时视频里查看效果.
绿色线圈即为识别区域线圈;红色线圈即为虚拟线圈.
设置完成后,在实时视频里查看效果.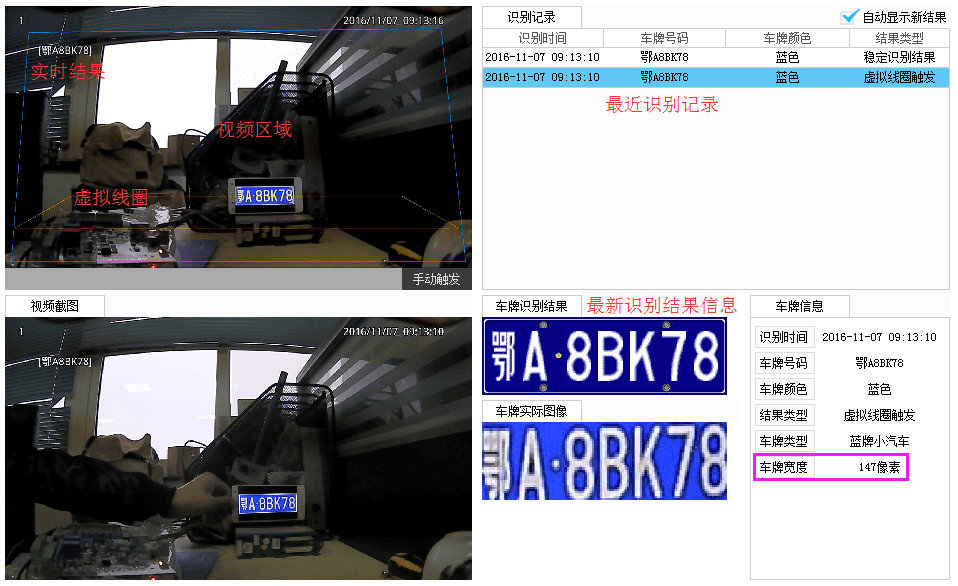
创盈购彩注意观察虚拟线圈触发的识别结果,车牌宽度值是否介于140-160之间.
创盈购彩 后说一下线圈的绘制对识别结果的影响:
首先我们是基于视频流的车牌识别系统,车辆在识别区域内行驶过程中,每秒会产生许多张识别图片,并产生许多个车牌识别 结果.比如鄂A12345进入摄像机识别区域内,在摄像机能看清车牌那刻开始产生识别结果,可能1秒钟会产生25个车牌识别结果或许 更多,这不重要,重要的是这些结果不一定都是正确的,有可能结果会是鄂A12346,湘A12345等等. 当行驶的车牌触碰到我们绘制的虚拟线圈时,就开始将之前众多车牌结果中,出现次数 多的那个车牌输出给车牌识别软件, 不管这个结果是对是错,软件认为获得了正确的结果,然后经过软件端的逻辑处理,输出命令控制道匣和显示屏的动作. 从这个理论上分析,识别区域上边和虚拟线圈上边之间的距离其实是预识别区,预识别区越大,识别的结果就越多,从而获取正 确识别结果的概率就越大.这也是为什么摄像机装的这么高,俯角不能太大的原因. 上述文字可以用八个字概括:多帧识别,单帧触发.
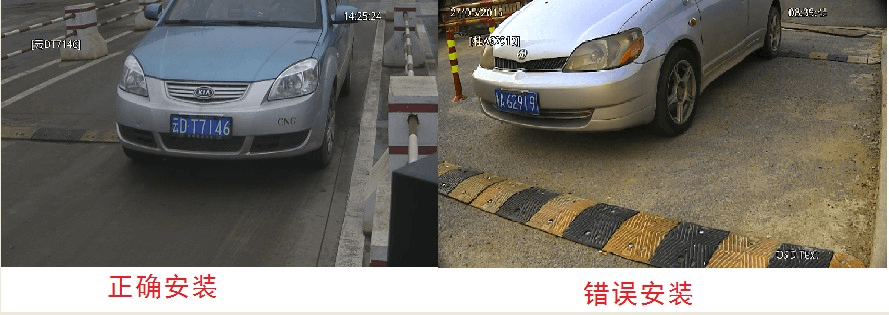
外置补光灯推荐采用白色LED补光灯,20~30W,聚光性质. 安装高度要和摄像机保持在0.5米~0.7米的距离,外置补光灯的亮斑直接打在车牌或者车牌偏下一点,可以根据车牌过曝情况 做微调,比如摄像机离地面高度1.6米,补光灯装在同一根立柱0.9米~1.1米高; 注意:特别需要避免与以下外置补光灯错误的安装情形: 外置补光灯与摄像机的安装距离过近,如下图,两者的安装距离小于30cm,补光灯的光线会直接被车牌表面的反光涂层反射 到镜头,导致车牌在视频图像中过曝,显得发白,影响 终的识别效果.

注意:请确保外置补光灯的安装位置到摄像机的垂直距离保持在50cm以上.







 扫一扫免费获取报价
扫一扫免费获取报价